
1.Leap Motion的参数说明及介绍 介绍 Leap Motion是一款体感摄像头,拥有两个红外摄像头和三个红外灯。在SDK中,Leap Motion的帧率可以到60FPS。拥有两个可选模式(桌面模式、头戴模式),…
分类:机器视觉
业余爱好者,主要关注三维立体视觉

获取深度图任意指定点的深度值
在立体视觉开发的时候,我们常常需要观察摄像头所获取图像的深度值规律,以便进一步提取特征 而在我们提取深度值的时候,往往更希望能够快速准确的获取指定点的深度值 本程序基于Kinect2所获取的深度图,其余深度相机获取的深度…

kinect2深度图获取并保存
首先为kinect停产默哀三秒 在过去将近一年的时间里,都在和kinect打交道,从检测球的过环到抛球交接,再到现在开始捣鼓的定位。 调试过和kinect相关的程序现在加起来也有5G多了(不同版本程序存档也算在内) 以后…

DCGAN(3):源代码采坑记录!+RUN起来!
坑1: [crayon-6a30036cae6c2139626798/] 解决办法: 在main.py中把 [crayon-6a30036cae6c7714793170/] 修改为 [crayon-6a30036cae6…
DCGAN(2):代码解读
实例化DCGAN [crayon-6a30036cae93b092768213/] batch_size 网络迭代同时处理的图像数量,共同决定网络该怎么更新 c_dim 输入图像的通道数,彩色图为3 dataset 数据…

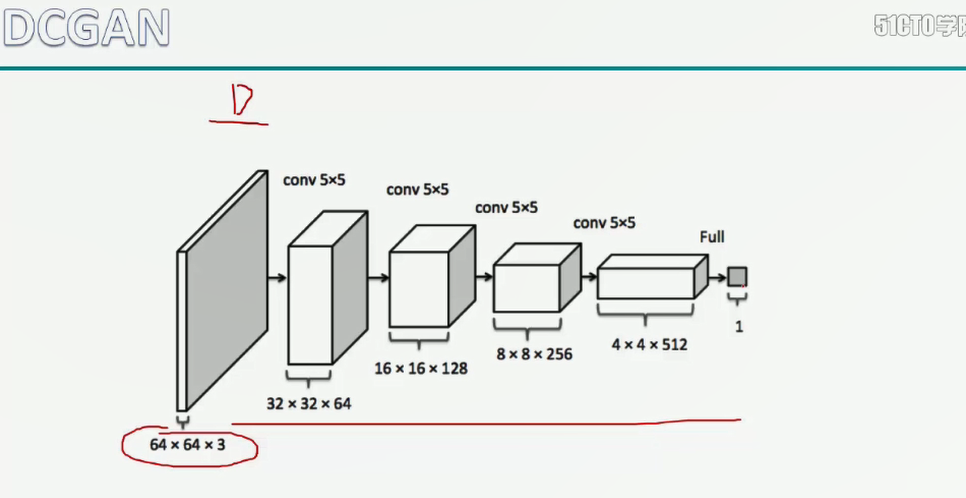
DCGAN(1):网络模型架构
DCGAN的网络架构图 生成网络: 判别网络 生成网络架构解读 DCGAN生成网络的目的是使100维随机初始化的向量转换成64*64*3的真实数据 1——>2 全连接层、reshape 由于输入的是100维的向量,…

GAN(4):训练对抗生成网络
在前面三篇博文中,我们已经完成了三个网络的构建、损失函数的构造 接下来,就是激动人心的训练时刻了 训练预先判别D_pre网络 [crayon-6a30036caeccc542555190/] 首先确定D_pre的训练次数…
GAN(3):构造损失函数
在前面两篇中,我们完成了生成网络和判别网络的构造,构造完成之后,我们构造一个损失函数,使得最终两个网络能够相互打架,相互进步 我们希望,对于真实数据,通过判别网络D后,能够认定为1(真实),而对于生成的数据,我们则希望其…
GAN(2):构造生成与判别网络模型
在前一篇中,我们定义了一个预先判别网络D_pre,从而得到了判别网络D的初始化权重wb,使得判别网络更精准。 在这一篇中,我们将构造一个生成网络模型,用于生成新的数据 生成网络构造 [crayon-6a30036caf5…
GAN (1):构造预先判别网络模型
GAN的目的 简而言之,在GAN中同时存在生成网络和判别网络两个神经网络,生成网络用于生成可以以假乱真新的数据,而判别网络用于判断所给的数据是否是真的数据。 而在GAN中,生成网络的目的是让判别网络认为其生成的数据是真实…